
Précédemment, nous avons étudié un nouvel objet : les vecteurs.
Mais qu'en est-il en géométrie repérée ?
Autrement dit : ont-ils un lien avec les coordonnées des points ?
1. Coordonnées dans un repère
On se place dans le plan, muni d'un repère \( (O;\vec{i};\vec{j}) \).
Définition : un point \( A \) a pour coordonnées \( (x_A; y_A) \) signifie que :
\( \overrightarrow{OA} = x_A\times\vec{i} + y_A\times\vec{j} \)
Exemple
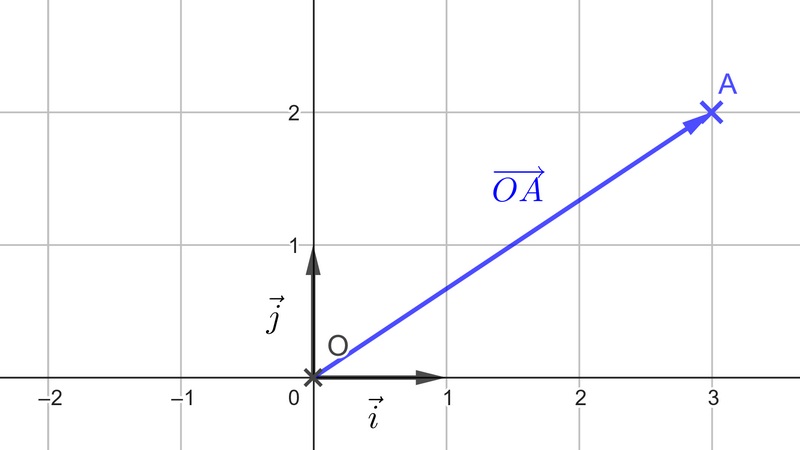
Sur la figure, les coordonnées de \( A \) sont \( (3; 2) \).
Autrement dit :
\( \overrightarrow{OA} = 3\vec{i} + 2\vec{j} \)
Remarque - Au collège, il est courant de définir un repère par la donnée de trois points \( (O; I; J) \). Les deux notions sont équivalentes !
Il suffit de définir les points \( I \) et \( J \) par :
\( \overrightarrow{OI} = \vec{i} \)
\( \overrightarrow{OJ} = \vec{j} \)
Définition : un vecteur \( \vec{u} \) a pour coordonnées \( \begin{pmatrix}x\\y\end{pmatrix} \) signifie que :
\( \vec{u} = x\times\vec{i} + y\times\vec{j} \)
Attention !
Les deux définitions se ressemblent beaucoup ! La différence est subtile : dans la définition des coordonnées, le point \( O \) n'intervient pas.
Autrement dit, changer l'origine d'un repère change les coordonnées d'un point, mais pas celles d'un vecteur !
Propriété ! Considérons deux points \( A(x_A; y_A) \) et \( B(x_B; y_B) \). Alors :
\( \overrightarrow{AB} \begin{pmatrix}x_B - x_A \\ y_B - y_A\end{pmatrix} \)
Preuve
Connaissant les coordonnées de \( A \) et \( B \), nous pouvons écrire que :
\( \overrightarrow{OA} = x_A\times\vec{i} + y_A\times\vec{j} \)
\( \overrightarrow{OB} = x_B\times\vec{i} + y_B\times\vec{j} \)
D'après la relation de Chasles,
| \( \overrightarrow{AB}~ \) | \( = \overrightarrow{AO} + \overrightarrow{OB} \) |
| \( = -\overrightarrow{OA} + \overrightarrow{OB} \) | |
| \( = -x_A\times\vec{i} - y_A\times\vec{j} + x_B\times\vec{i} + y_B\times\vec{j} \) | |
| \( = (x_B-x_A)\times\vec{i} + (y_B- y_A)\times\vec{j} \) |
\( \blacksquare \)
Exemple
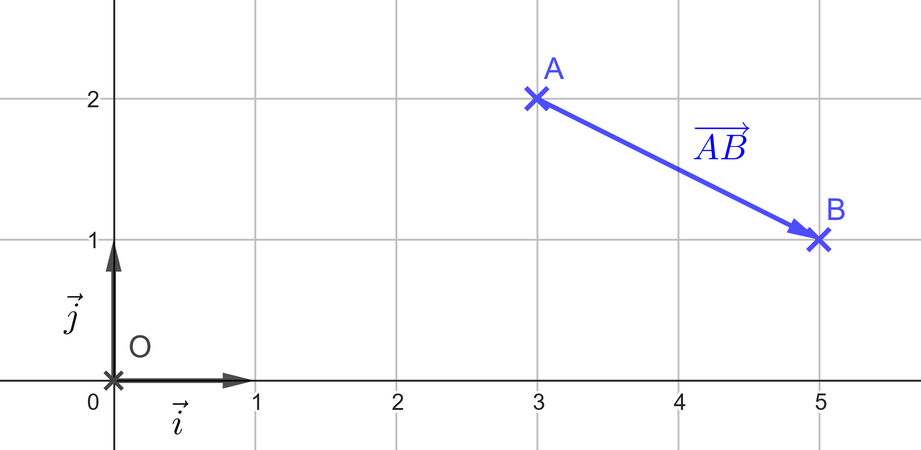
Considérons les points \( A(3; 2) \) et \( B(5;1) \).
Nous obtenons alors :
\( \overrightarrow{AB} \begin{pmatrix}5 - 3 \\ 1 - 2\end{pmatrix} = \begin{pmatrix}2 \\ -1\end{pmatrix} \)
2. Opérations et coordonnées
On se place dans le plan, muni d'un repère \( (O;\vec{i};\vec{j}) \).
On considère un nombre réel \( k \), et deux vecteurs \( \vec{u}\begin{pmatrix}x\\y\end{pmatrix} \) et \( \vec{v}\begin{pmatrix}a\\b\end{pmatrix} \)
Propriétés - Les coordonnées des vecteurs \( k\vec{u} \) et \( \vec{u} + \vec{v} \) sont :
\( k\vec{u} \) : \( \begin{pmatrix}k\times x\\k\times y\end{pmatrix} \) \( \vec{u} + \vec{v} \) : \( \begin{pmatrix}x + a\\y + b\end{pmatrix} \)
Preuve
Connaissant les coordonnées de \( \vec{u} \) et \( \vec{v} \), nous pouvons écrire que :
\( \vec{u} = x\times\vec{i} + y\times\vec{j} \)
\( \vec{v} = a\times\vec{i} + b\times\vec{j} \)
- \( k\times\vec{u} = k\times(x\times\vec{i} + y\times\vec{j}) = k\times x\times\vec{i} - k\times y\times\vec{j} \)
- \( \vec{u} + \vec{v} = x\times\vec{i} + y\times\vec{j} + a\times\vec{i} + b\times\vec{j} = (x+a)\times\vec{i} + (y+b)\times\vec{j} \)
\( \blacksquare \)
3. Norme d'un vecteur
Définition : considérons un vecteur \( \vec{u}\begin{pmatrix}x\\y\end{pmatrix} \). Sa norme est définie par :
\( \Vert\vec{u}\rVert = \sqrt{x^2 + y^2} \)
- On reconnaît une formulation du théorème de Pythagore !
- On considère deux points \( A(x_A; y_A) \) et \( B(x_B; y_B) \). Alors :
\( AB = \lVert\overrightarrow{AB}\rVert = \sqrt{(x_B - x_A)^2 + (y_B - y_A)^2} \)
Exemple : considérons les points \( A(3; 2) \) et \( B(5;1) \). Alors :
\( AB = \lVert\overrightarrow{AB}\rVert = \sqrt{(5 - 3)^2 + (1 - 2)^2} = \sqrt{5} \)